
 �ھ��ͷ�
�ھ��ͷ�
 ��I(y��)��
��I(y��)��


1
Ӳ����(zh��n)�� / Hardware
➤ KUKA KR C4 ������
➤ BECKHOFF ���ģ�K EK1100�� EtherCAT ��
➤ BECKHOFF ݔ��ģ�K EL1809��16 ���c��(sh��)���� ��
➤ BECKHOFF ݔ��ģ�K EL2809��16 ���c��(sh��)���� ��
ע��ȫ���ᵽ�� BECKHOFF �� “����” Ʒ�ơ�
2
ܛ����(zh��n)�� / Software
�c������������(y��ng)�� WorkVisual ܛ�� ���S�C��P��
3
Ӳ���B�� / Connection
��ܛ��ģ�K����֮ǰ�������҂����Ȟ��ҽ�Bһ��������b�Ӿ���

❶ �� CCU �ϵ� X44 ���� EK1100 �� EtherCAT IN �ڡ�
❷ EK1100 ���Ă�ָʾ�����D�ϾGɫ�^(q��)��)�������ăɂ������������ Link �����l�W�q��RUN ��������
❸ �Դ�˵ĽӾ���С�ݽz����һ�ֻ�ʮ�֣����뷽���У�б����?li��n)܉������?d��o)������A���У��ٌ�С�ݽz��ጷ�ȡ������(d��o)�������Ρ�
ע����EK1100 �Ϸ��� 24V / 0V �ǽo EK1100 ������늵ģ����·��� + / - �ǽo���m(x��)ģ�K��ݔ��/ݔ�����ӹ�늵ģ�����Ҫ�Ӿ���

❹ ݔ���·��Ҫ�c�Դ���O�B�ӣ������������_�P(gu��n)��һ�˽� EL1809 �ϵ� 16 ����������һ������һ�˽� EK1100 �ϵ� + ��

❺ ݔ����·��Ҫ�c�Դؓ(f��)�O�B�ӣ���ؓ(f��)�d��һ�˽� EL2809 �ϵ� 16 ����������һ������һ�˽�EK1100 �ϵ� - ��
4
ܛ������ / Configuration
1. ��(d��o)��ģ�K�O(sh��)���f���ļ������Q ESI ���ļ�
❶ �� BECKHOFF �پW(w��ng)���d���P(gu��n)ģ�K�O(sh��)���f���ļ�( ESI )�����_ WorkVisual ܛ�����ˆ� File / Import / Export / Import device description file��


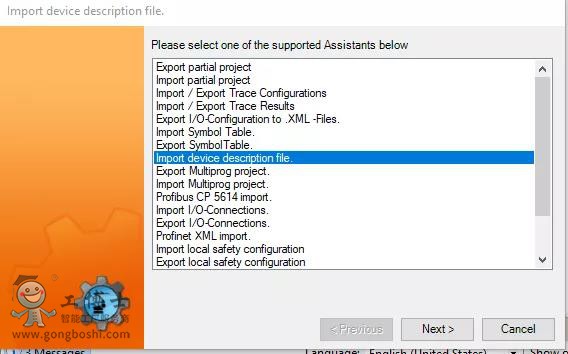

❷ �c���g�[���ҵ����P(gu��n)�� ESI �ļ�����(d��o)���ϵ�y(t��ng)���ԄӸ����O(sh��)��Ŀ䛡���������C�����Ŀ�P(gu��n)�]���܌�(d��o)���O(sh��)���f���ļ���

2. �M�B(t��i)����
❶ ʹ�ùPӛ����X���C�����Ŀ�ς�����ʹ�õ� WorkVisual ܛ���У�����ԓ�Ŀ���x�������Y(ji��)��(g��u)��Bus structure�����c�����(bi��o)���I�����ӡ�




❷ �x�� KUKA Extension Bus���c�����(bi��o)���I���ӣ��� EK1100 ģ�K������ KEB �����ϡ�

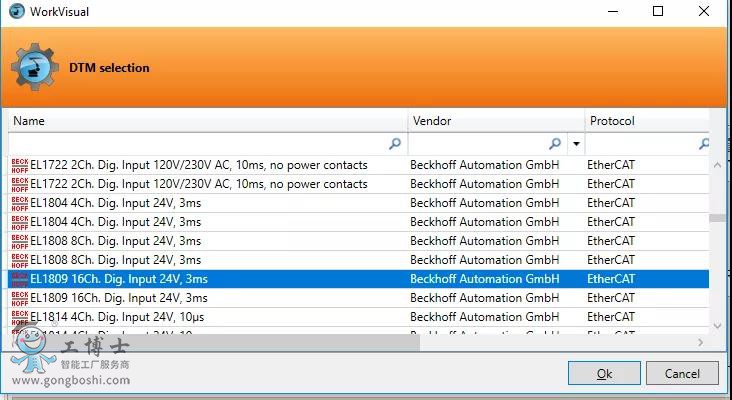
❸ �x�� EK1100 ģ�K���c�����(bi��o)���I���ӣ��� EL1809 �� EL2809 ���ӵ� EK1100 �·���



3. ��ַӳ�䣨I/O Mapping��
❶ ��ݔ����̖�������c�� IO Mapping ��(bi��o)�� ����߅�x�� KRC I/Os ���c�� Digital Inputs �҂�(c��)�x�� Fieldbusses ��(bi��o)�����c�� EL1809 ģ�K��

❷ ��߅ Ctrl+A ȫ�x��Ȼ����ҷ�����(c��)�C������ʼݔ�����ַλ���Y(ji��)��Ҋ�D��

❸ ݔ���ĵ�ַӳ��Ҳ����ˡ�

�j(lu��)����")


�j(lu��)110")