
 在線客服
在線客服
 企業微信
企業微信


KUKA C1-C2機器人工作原理
 描述
描述
1 機器人
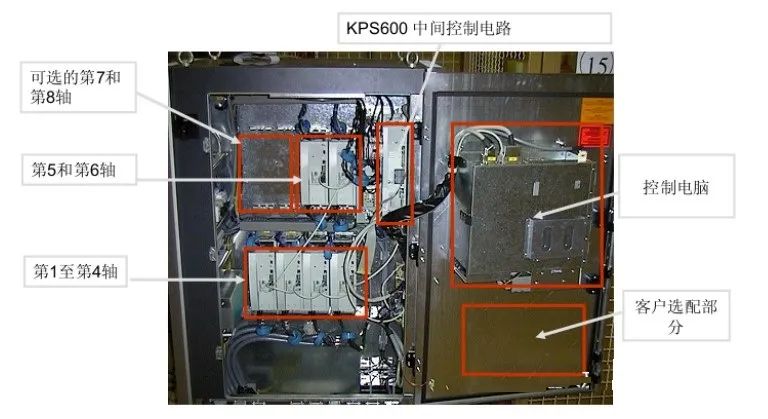
2 控制柜
3 馬達電纜 X30
4 數據電纜 X31
5 馬達電纜 X20
6 數據電纜 X21
7 接地電纜 16 mm²
8 電源 400 V 3~ X1
主要內部安全監視 :
電機監視 : 電機通過在電機繞組中的溫度探頭進行過載保護。
電壓監視 : 如果過高或過低的電壓超出了半導體放大器的允許的范圍,將導致伺服驅動模塊的關斷。
溫度監視 : 控制柜的溫度(內部溫度)受到監視.溫度超出范圍將導致控制部分的關斷。
點動(自動中斷功能) :
所有工作程序都能夠在降低的速度條件下以手動的,測試運行方式來完成動作。工作程序只有在按住」START」鍵的情況下才能運行。一旦放開」start」鍵,機器人就停止動作。只有通過重新按」start」鍵才能繼續運行工作程序。
關閉機器人控制系統
在關閉時,機器人保持停止并且機器人控制系統關機。機器人控制系統自動備份數據。
KRL 庫卡機器人程式語言(KUKA Robot Language)
KSS 庫卡系統軟體
VxWorks 實時作業系統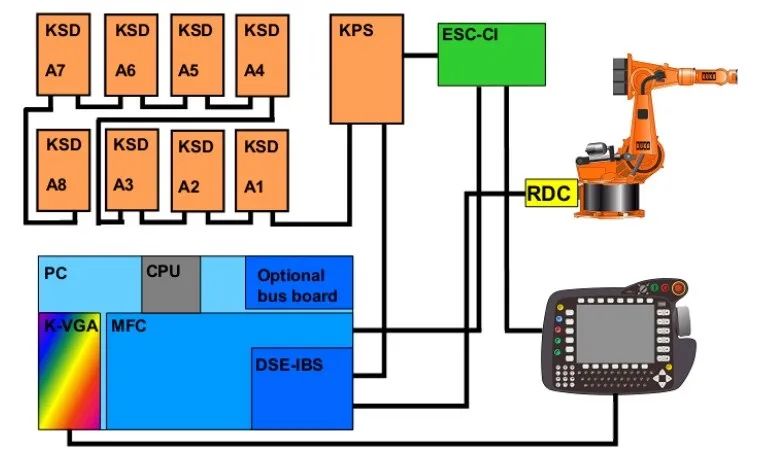
1 機器人
2 控制柜
3 馬達電纜 X30
4 數據電纜 X31
5 馬達電纜 X20
6 數據電纜 X21
7 接地電纜 16 mm²
8 電源 400 V 3~ X1
主要內部安全監視 :
電機監視 : 電機通過在電機繞組中的溫度探頭進行過載保護。
電壓監視 : 如果過高或過低的電壓超出了半導體放大器的允許的范圍,將導致伺服驅動模塊的關斷。
溫度監視 : 控制柜的溫度(內部溫度)受到監視.溫度超出范圍將導致控制部分的關斷。
點動(自動中斷功能) :
所有工作程序都能夠在降低的速度條件下以手動的,測試運行方式來完成動作。工作程序只有在按住」START」鍵的情況下才能運行。一旦放開」start」鍵,機器人就停止動作。只有通過重新按」start」鍵才能繼續運行工作程序。
關閉機器人控制系統
在關閉時,機器人保持停止并且機器人控制系統關機。機器人控制系統自動備份數據。
KRL 庫卡機器人程式語言(KUKA Robot Language)
KSS 庫卡系統軟體
VxWorks 實時作業系統




